
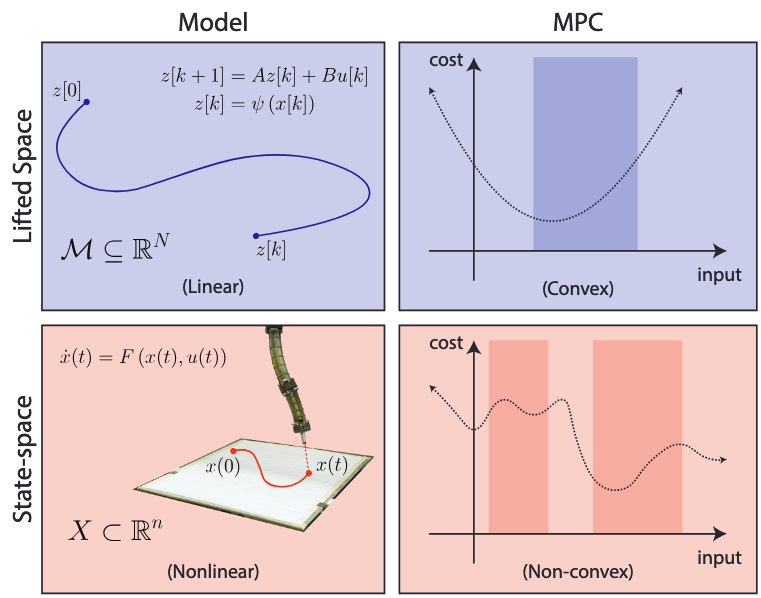
It is difficult to precisely control soft robots due to their complicated dynamics. We utilize global linear embedding and control techniques to demonstrate previously unachievable performance capabilities such as trajectory following and automated object sorting.
Publications
- D. Bruder, D. Bombara, R.J. Wood. "A Koopman-based Residual Modeling Approach for the Control of a Soft Robot Arm". International Journal of Robotics Research (IJRR). 2024. [link] [video]
- D. Bruder, X. Fu, R. B. Gillespie, C. D. Remy, and R. Vasudevan. "Koopman-based Control of a Soft Continuum Manipulator Under Variable Loading Conditions". IEEE Robotics and Automation Letters. 2021. [link] [bibtex] [video]
- D. Bruder, X. Fu, and R. Vasudevan. "Advantages of Bilinear Koopman Realizations for the Modeling and Control of Systems with Unknown Dynamics". IEEE Robotics and Automation Letters. 2021. [link] [bibtex] [video]